(2017.01)
ISPIV2017
The 12th International Symposium on Particle Image Velocimetery
June 19 (Mon) – 21 (Wed), 2017 / Grand Hotel, Busan, Korea
Digital holographic micro-PTV based on phase images
Yoshiyuki Morita1, Masamichi Oishi1 Tsukasa Matsuo2 and Marie Oshima3
1 Institute of Industrial Science, the University of Tokyo, Tokyo, Japan
ymorita@iis.u-tokyo.ac.jp
2 Ushio Inc., Yokohama, Japan
3 Interfaculty Initiative in Information Studies, the University of Tokyo, Tokyo, Japan
ABSTRACT
Microfluidic devices for biophysical applications require to measure micro flow in the 3D (three-dimension) to obtain a better understanding of the biophysical phenomena. In order to achieve this objective, DHM-PTV (Digital Holographic Microscopy – Particle Tracking Velocimetry) is a suitable technique since it is based on a 3D micro optical field obtained by DHM and gives 3C-3D (three-component-three-dimensional) velocity field in a micro volume [1] of complex, random, and unsteady flow. However the spatial resolution in the depth direction is not as good as that in the in-plane direction due to a finite size of an image sensor. The paper presents a new particle detection method based on phase information. Precision of the new particle detection method was evaluated and a 3D flow field was measured using the present algorithm.
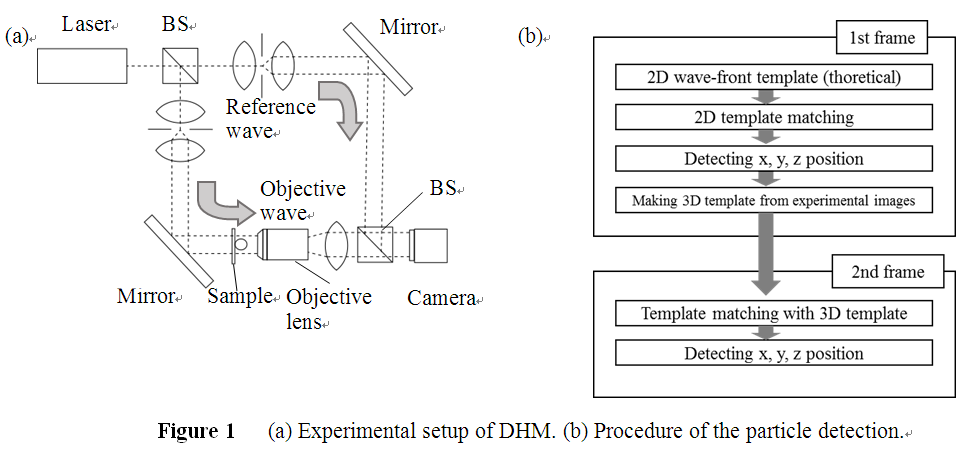
Off-axis DHM (UDHM-01, Ushio Inc., Japan) in Figure 1 (a) consists of interferometer, laser and objective lens. 2D interference fringe patterns were recorded on a camera and phase information was reconstructed numerically [2]. Figure 1 (b) shows the procedure of the particle detection method. The positions of particles were determined by template matching. In the first frame, the position of the particle was detected using the theoretically generated 2D wave-front template. After detection, surrounding experimental phase images were used as a 3D template of the next frame.
In order to evaluate particle detection precision, 3D positions of static 20 particles in the glycerin water were measured in 10 frames. Figure 2 (a) shows reconstructed cross section of phase and amplitude images around a particle. Phase wave-front varied as it passed through the particle by the difference of the refractive index.
Figure 2 (b) shows the standard deviation of the positions of the detected particles in 10 frames. The particle’s diameter was 2μm. The error in the depth direction was larger than that in the in-plane direction, since the degree of similarity in the in-plane direction had a weak peak as shown in Figure 2 (c). However, the error was smaller than that in one of the conventional amplitude particle detection method.
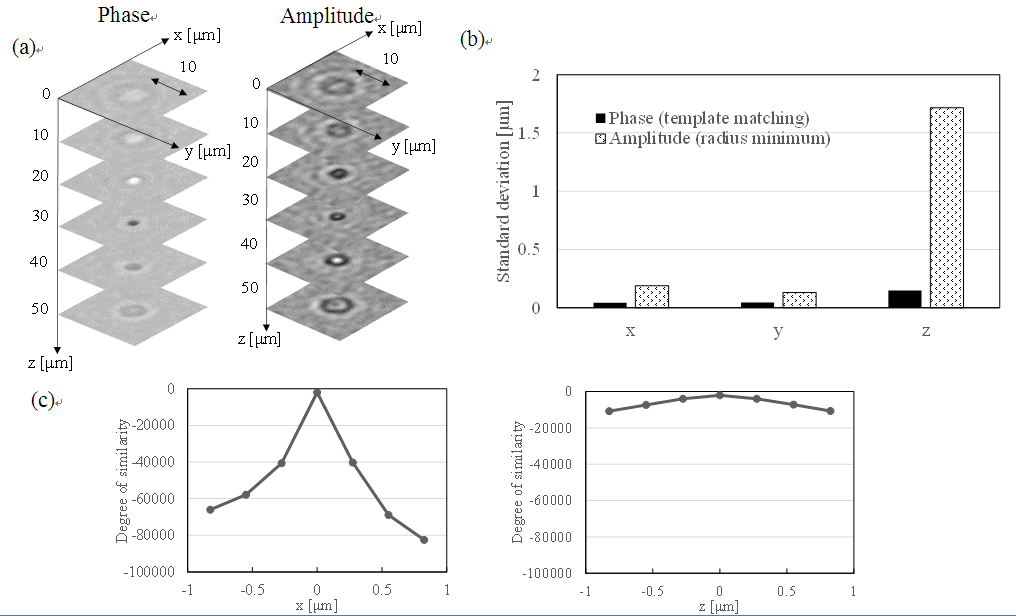
Figure 2 (a) Phase and Amplitude wave-front images of around a particle. (b) Standard deviation of detected static particles’ positions in each axis. Phase: 3D template matching with phase image. Amplitude: particle detection with the radius of the amplitude images. (c) The distribution of the degree of similarity around a particle of the phase method.
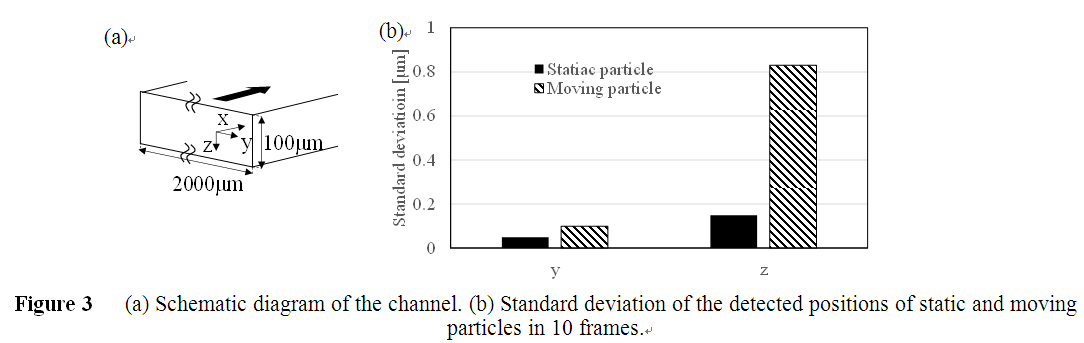
Using the phase based particle detection algorithm, Poiseuille flow in a microchannel was measured in 10 frames. The channel cross section was rectangular and the size was 2000×100 μm as shown in Figure 3 (a). The measurement volume was 226×226×206 μm. Figure 3 (b) shows the standard deviation of the positions of the particles in 10 frames. The error value was submicron order of both static and moving particles. However, the error of the moving particles, especially in the depth direction, was larger than that of static particles. It was considered that the moving particles produced more noise than static ones.
REFERENCES
[1] S Satake, T Kunugi, K Sato, T Ito, H Kanamori, J Taniguchi “Measurements of 3D flow in a micro-pipe via micro digital holographic particle tracking velocimetry” Measurement Science and Technology 17 (2006) pp.1647-1651
[2] M Takeda, H Ina, and S Kobayashi “Fourier-transform method of fringe-pattern analysis for compute-based topography and interferometry” Journal of the Optical Society of America 72 (1982) pp.156-160