(2017.01)
光アライアンス2017年1月号
デジタルホログラフィを用いたリアルタイム三次元計測器の開発とその応用
ウシオ電機株式会社
松尾 司
東京大学生産技術研究所
木下晴之,大島まり,藤井輝夫
1.はじめに
生化学や分子生物学の分野において,µTAS(Micro-Total Analysis Systems)やLab-on-a-Chip 1)と呼ばれる手のひらサイズの小型集積型デバイスを使って,総合的な生化学分析を行おうとする研究が盛んである。ごく少量の試料や試薬を使って,従来の装置に比べてより高精度で効率的な分析や反応を,より短時間で実施することを目指すこのシステムでは,微小スケールにおける流体の挙動,すなわちマイクロフルイディクスを理解し,効果的に利用することが重要である。
上下左右を壁面で囲まれたマイクロ流路内では,重力や慣性力などの体積力よりも,粘性力や界面張力といった表面力が支配的になるため,ほとんどの流れは層流となり,乱流になることはほとんどない。したがって,その挙動は単純で2次元的になると思われがちであるが,しかし実際には,熱対流,マランゴニ対流,界面動電現象,液液界面や気液界面の影響など複雑な物理現象が絡み合い,その結果,複雑で3次元的な流動を示すことも多い。そのため,マイクロフルイディクスの研究において,マイクロ流路内の流動を3次元的に観察,測定するツールの果たす役割は非常に大きい。そこで著者らの研究グループは,微小スケールの流体現象を3次元的かつリアルタイムで観察・測定することができるデジタルホログラフィの原理を用いたリアルタイム三次元計測器(, 以下R3D)2)を新たに開発した。本稿ではまず,開発したDHMのシステム構成や特長について述べる。続いて,それを用いた2つの異なる計測事例を紹介する。
一つめの計測事例は,マイクロ流路内における微小液滴の3次元形状をリアルタイムで測定した例である。著者らは,開発したR3Dを用いて,マイクロ流路内でダイナミックに変形しながら流れる微小液滴の形状を時系列で捉えることに成功した3)著者らの開発したR3Dを使えば,マイクロ流路内にある微小液滴の3次元形状を時系列で測定することが可能になる。
紹介するもう一つの計測事例は,マイクロ流れの3次元流速分布計測である。著者らの研究グループは,流体中に分散させた微粒子群の3次元位置を検出する技術を応用することで,微小流路内流れの,3次元空間における速度3成分を時系列で計測することに成功した4)。)著者らは,開発したR3Dを応用し,マイクロ流れに適用可能な,R3Dをベースとした3次元空間速度3成分(3D3C)PTVシステムを実現した。それを用いて,実際に3次元的なマイクロ流れを実測した例を紹介する。
2.リアルタイム三次元計測器
2-1 システム構成
最初に,本研究で開発したリアルタイム三次元計測器(R3D)について述べる。R3Dは,ホログラフィの原理に基づく干渉計の一種であり,バイオメディカルイメージングや表面検査などを目的とした研究開発が行われている。ホログラフィとは,光の波動性を利用し,写真乾板などの2次元記録媒体に物体の3次元情報を記録・再生する技術であり,1948年にガボールによって発明された。デジタルホログラフィは,2次元記録媒体をCCDなどのデジタル撮像素子に置き換えた技術であり,取得したデジタルなホログラムデータに対し,計算機上で光回折計算を行うことで形状を再生する方法である。デジタルホログラフィの特長として,1)情報が劣化せず,2)記録後すぐに再生像が得られる,3)物体の位相情報が得られるため高精度な高さ計測が可能,などが挙げられる。
開発したR3Dのシステム構成と外観を図1と図2にそれぞれ示す。
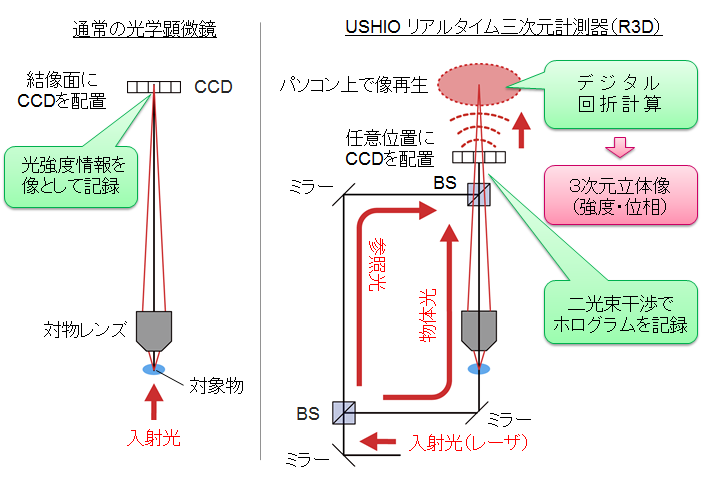

図1 R3Dシステム構成 図2 R3D外観
光源から出力されたレーザ光は,ビームスプリッタ(BS)により2光束に分岐され,それぞれビームエキスパンダを介すことでビーム径が拡大された平行光となる。拡大ビームのうち,一つは計測対象に照射され,その形状に対応する透過回折光となり,回折光は対物レンズによって微小領域が拡大されて,CCDに入射する。もう片方のビームは,参照光として,CCD面に対して光軸をわずかに傾かせてCCDに入射する(オフアクシス式5))。これら2つのビームの干渉縞がホログラムとしてCCDにてデジタルに記録される。
オフアクシス式を採用している本システムでは,フーリエ変換法6)により一枚の画像から空間的に複素振幅情報を得られるため,CCDのフレームレートと同じスピードで計測が可能になっている。これはすなわち,時系列計測,リアルタイム計測が可能であることを示している。また,光学系にテレセントリック光学系7)を用いることで,通常顕微鏡測定で不可避の球面状の位相歪みを生じさせない構成となっている。
2-3 3次元速度3成分計測法
著者らの開発したR3Dと前述のホログラム解析法を利用すれば,流体中にトレーサとして分散させた微粒子(トレーサ粒子)の3次元形状も測定できる。さらに,形状が既知(球形)で粒径も既知の均一なトレーサ粒子を用いることで,そのトレーサ粒子の3次元空間における重心位置を算出することも可能となる。そこで著者らは,R3Dでマイクロ流れの中に分散したトレーサ粒子の空間位置を時系列で測定し,そのトレーサ粒子の位置を時間方向に対して追跡していくことにより,3次元空間における速度3成分計測法,すなわちマイクロ3D3CPTVを実現した。
R3Dによる時系列3D3CPTVシステムの解析手順を図3に示す。まず,R3Dにより,ホログラムを時系列記録する。次に,各時刻のホログラムに対して前述のホログラム解析法を適用し,高さの異なる明視野像を求め,3次元再生像を生成する。この3次元再生像に対して粒子検出処理を行うことで,3次元空間での粒子位置を出力する。最後に,隣接する2時刻の粒子位置結果を用いて,粒子追跡を行い,3D3Cの速度ベクトルデータを出力する。なお,粒子追跡処理には,2時刻間で最近接の粒子を同一粒子とする,もっとも基本的な粒子追跡アルゴリズムを用いた。
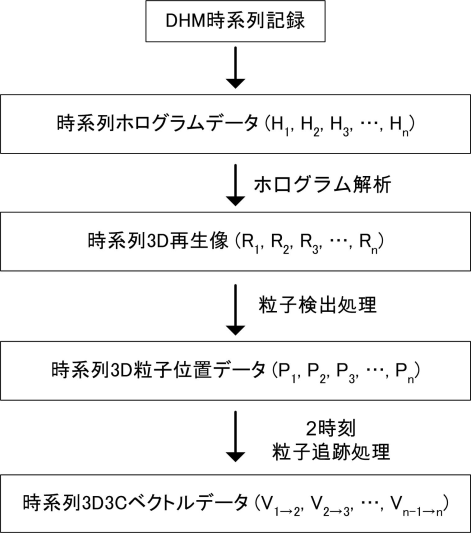
図3 R3Dによる時系列3D3CPTV解析手順
3.微小液滴形状の時系列3次元計測
R3Dを用いた計測実施例として,微小液滴形状の時系列3次元計測を紹介する。ここでは,マイクロ流路内で液滴が形成される様子を計測対象としている。図4に液滴を生成するために用いたマイクロ流路を示す。シリコーンオイル(KF-6001,信越化学工業株式会社)が流れる連続相と,蒸留水が流れる分散相がT字流路で合流する構成となっており,合流部分で蒸留水がシリコーンオイルの流れによって引きちぎられて,微小な液滴が連続的に生成される機構となっている。流路深さは93 µm,連続相が流れるメイン流路の幅は400 µm,そこへ合流する分散相の流路の幅は50 µmである。流路材質はPDMSであり,屈折率1.4125(25℃),流路表面は疎水性である。シリコーンオイルの屈折率は1.412(25℃),水の屈折率は1.332(25℃),オイルと水の界面張力は6.1 mN/m,流量は連続相,液滴相ともに3.0 µL/minに設定した。
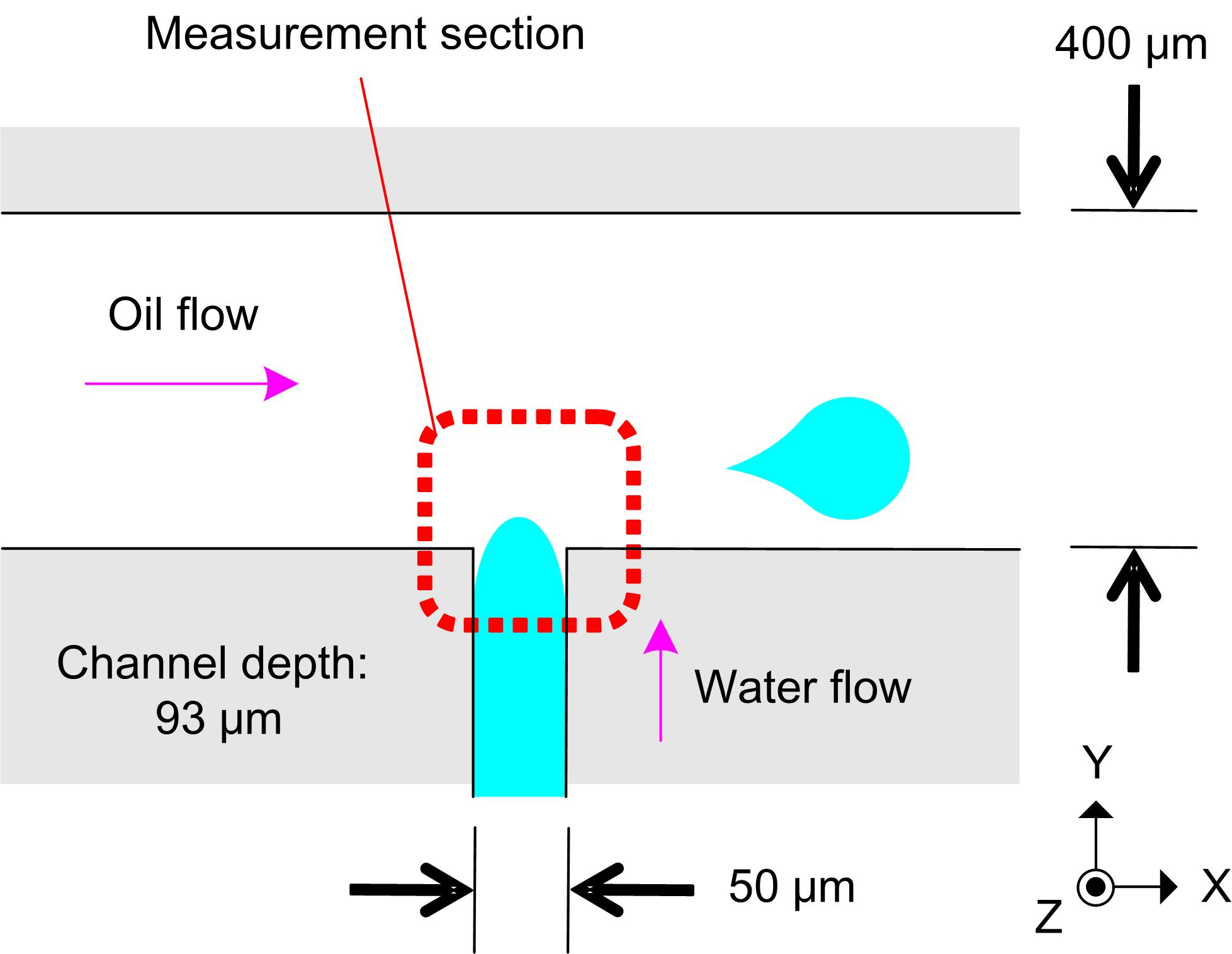
図4 液滴生成のためのT字型マイクロ流路
液滴がくびれ,ちぎれる瞬間の各フレームでの強度再生像と位相再生像を図7に示す。前述の位相高さ変換式と既知である屈折率値より,位相再生像で観察される等高線の間隔は15.8 µmとなり,高さ分解能は62 nmと見積もられる。この結果より,2次元平面上で時系列での液滴の高さ情報の変化を定量的に計測できていることがわかる。図5の画像群に対して,特に液滴くびれ部分を観察しやすくするため,前述の可視化処理を行って液滴形状を立体表示した結果を図6に示す。この結果より,徐々に液滴のくびれが細くなり,さらにその位置が先端方向へ移動していく様子がフレーム毎に視覚的に確認できる。なお,t = 0.033 [s]時に観察される不連続部分は位相アンラッピング処理の部分的失敗によるものである。
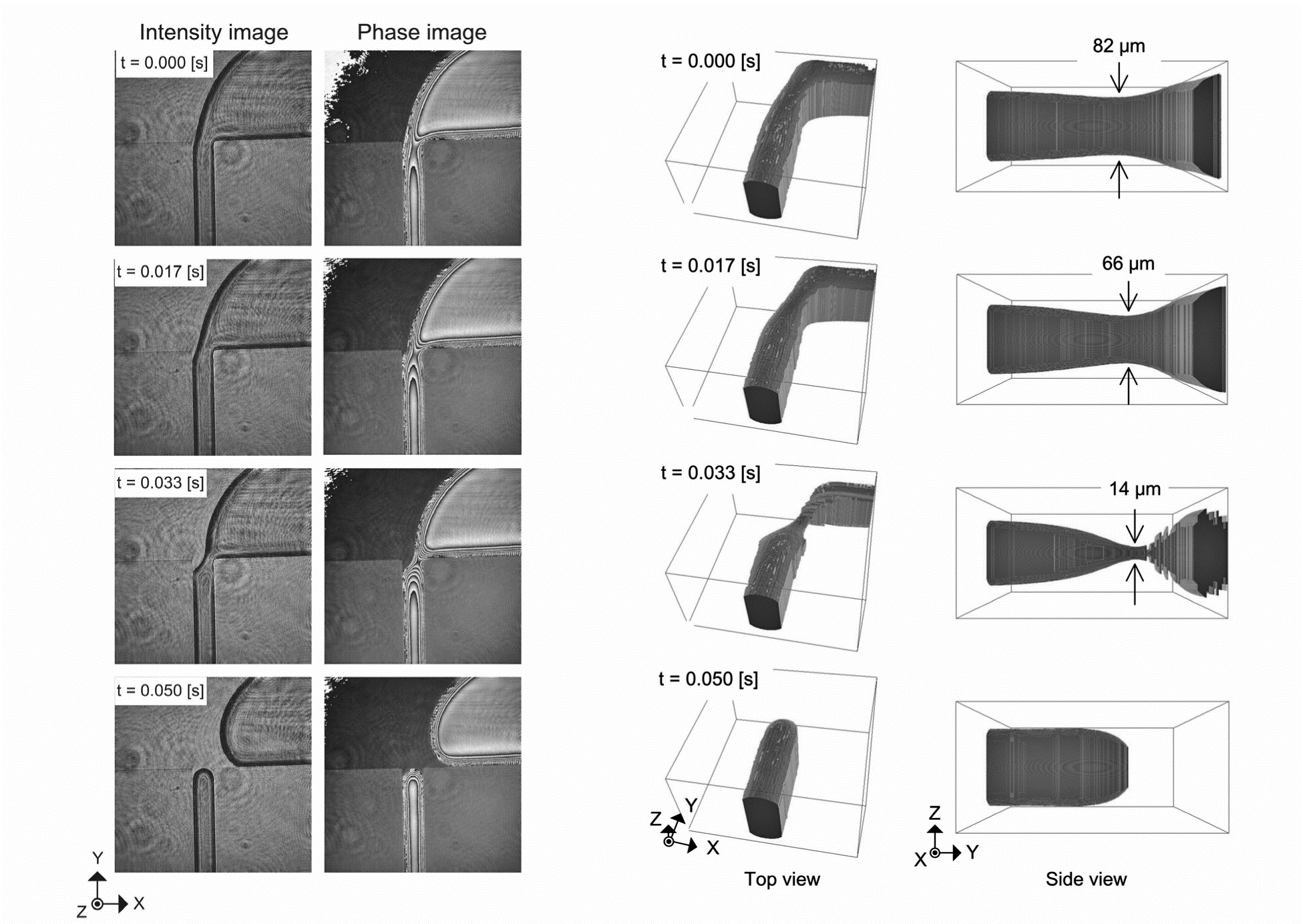
図5 時系列の強度再生像と位相再生像 図6 時系列3次元液滴形状
4.マイクロ流れの時系列3次元計測
R3Dのもう一つの計測実施例として,マイクロ流れの時系列3次元流速分布測定を紹介する。ここでは,Z方向の速度成分が大きい流れを意図的に作るために,図7のような3次元的な構造を持った微小流路を作製した。U字流路を縦置きにした構造となっており,折り返し部分でZ方向への流れができるように設計されている。流路はPDMS製であり,使用流体は濃度20%のグリセリン水溶液,そこにトレーサ粒子として直径2 µmのポリスチレン粒子を体積比0.0025%の濃度で混入させた。濃度20%のグリセリン水溶液を用いることで,液体と粒子の比重を同じにしている。それにより,重力による粒子の沈降を防いでいる。シリンジポンプでトレーサ粒子が分散したグリセリン水溶液を流路に送液し,流量は3 µL/minに設定した。計測空間は折り返し部分を中心とした282 µm×282 µm×100 µmとしている。
上記流れ内のトレーサ粒子をR3Dでホログラムを記録・解析し,連続したフレームに対して粒子位置検出を実施した結果を図8に示す。これはすなわち,検出された粒子の軌跡を示しており,この結果は,予想される流れ場によく一致していることがわかる。また,上記流れをPTV解析した結果を図9に示す。この結果から,3次元マイクロ流れの3D3C速度ベクトルを計測できていることが確認できる。なお,各時刻における平均粒子検出数は56個であった。
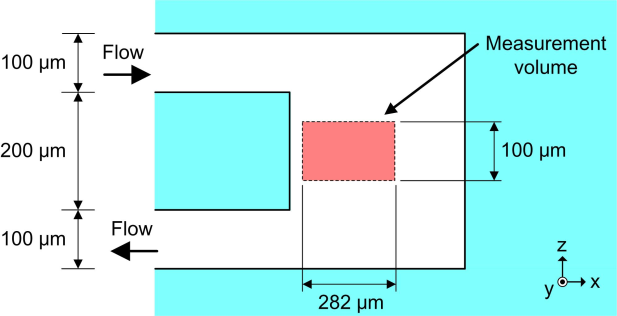
図7 3次元流れを生成するマイクロ流路
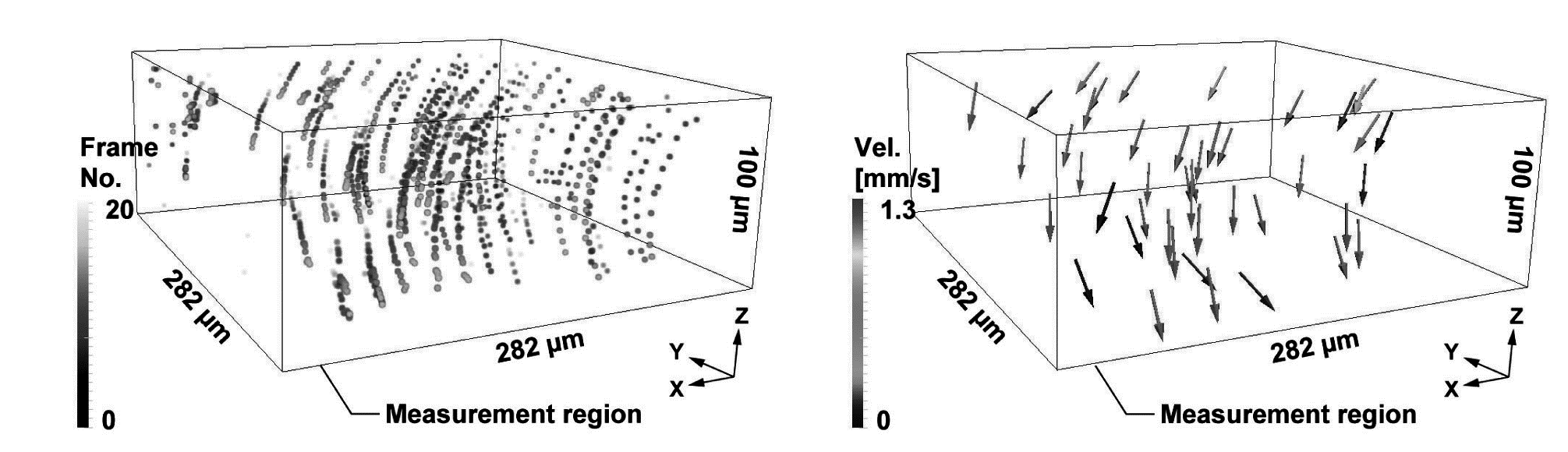
図8 検出されたトレーサ粒子の重心位置 図9 3D3Cベクトル
5.まとめ
本稿ではまず,著者らの研究グループが開発した,微小スケールにおける流体現象を3次元的かつリアルタイムで観察,測定することができるリアルタイム三次元計測器(R3D)について,そのシステム構成や特長を示した。次に,そのR3Dを用いた3次元形状測定の実施例として,微小液滴形状の時系列3次元計測を紹介した。視野領域563µm×563µmにおける3次元形状を,面内分解能1.1µm,高さ分解能62 nm,60 fpsで時系列計測することが可能であることを示し,実際に,T字型のマイクロ流路内で微小液滴が生成される様子を可視化計測したところ,従来技術では不可能であった,液滴の3次元形状とその時系列変化を定量的に可視化,計測できることを示した。さらに,R3Dを利用した流速分布測定の例として,マイクロ流れの時系列3D3CPTVを紹介した。マイクロ流れに適用可能な,R3Dをベースとした時系列3D3CPTVシステムを実現し,さらに,実際の3次元的なマイクロ流れを実測することで,微小空間282µm×282µm×100µmの流れ場の 3D3C速度ベクトルデータを得ることが可能であることを示した。以上より,本研究で構築したデジタルホログラフィック顕微鏡とそれを用いた3次元形状計測法,および3D3CPTVシステムは,マイクロフルイディクス研究のツールとして非常に有用であると言える。
参考文献
1) Reyes, D. R., et al.: “Micro total analysis systems. 1. Introduction, theory, and technology”, Analytical Chemistry, Vol.74, pp.2623-2636 (2002).
2) Schockaert, C.: “Introduction, Chapter 1 in Digital Holography Microscopy Applications”, VDM Verlag Publ., pp.5-23 (2009).
3) 松尾司,木下晴之,藤井輝夫,本篤志:「デジタルホログラフィック顕微鏡による微小液滴形状の時系列三次元計測」,第40回可視化情報シンポジウム,可視化情報,Vol.32,Suppl. No.1,pp.135-138 (2012).
4) Arroyo, M. P. and Greated, C. A.: “Stereoscopic particle image velocimetry”, Measurement Science and Technology, Vol. 2, pp.1181-1186 (1991).
5) Takeda, M., et al.: “Fourier-transform method of fringe-pattern analysis for computer-based topography and interferometry”, J. Opt. Soc. Am, Vol.72, No. 1, pp.156-160 (1982).
6) Kingslake, R.: “Basic Geometric Optics”, Chapter 6 in Applied Optics and Optical Engineering, Academic Press Inc. Publ., pp.201-244 (1965).
7) Shimobaba, T., et al.: “Real-time digital holographic microscopy using the graphic processing unit, Optics Express, Vol.16, No.16, pp. 11776-11781 (2008).
松尾 司 MATSUO, Tsukasa
ウシオ電機株式会社 技術統括本部 開発推進部 新技術開発グループ
〒225-0004 神奈川県横浜市青葉区元石川町6409
木下晴之 KINOSHITA, Haruyuki
東京大学 生産技術研究所
統合バイオメディカルシステム国際研究センター 藤井(輝)研究室 特任助教
〒153-8505 東京都目黒区駒場4-6-1 Fw601
大島まり OSHIMA, Marie
東京大学 大学院情報学環・生産技術研究所 教授
〒153-8505 東京都目黒区駒場4-6-1
藤井輝夫 FUJII, Teruo
東京大学 生産技術研究所
統合バイオメディカルシステム国際研究センター 教授
〒153-8505 東京都目黒区駒場4-6-1