干渉露光機ステージのモデル化
Modeling of interference lithography stage
折原 真児,野本 憲太郎,那脇 洋平,鶴岡 和之
Shinji ORIHARA, Kentaro NOMOTO, Yohei NAWAKI, and Kazuyuki TSURUOKA
ウシオ電機株式会社
Ushio Inc.
Interference lithography system can expose high fine periodic patterns without shading mask. Our exposure method called SOPHIL (Scanning Overlapped Phase Interference Lithography) requires a positional accuracy of ±10 nm while the stage is driven at 10 mm/s. We modeled an interference lithography machine in order to clarify the development policy to achieve a scanning speed of 100 mm/s. This report describes the modeling of the H-shaped stage currently employed and the matching of measured and simulated data by Bayesian optimization using python and OpenModelica. Optimization was performed for a 50 mm step motion in the X and Y directions. The optimization results along the step direction showed good matching between the simulation and the actual measurement. On the other hand, in the vertical direction, there were several behaviors that the model was not able to simulate. It is a future work to identify and model the causes of the behaviors that are not simulated.
Key Words: Model Based Design, 1D CAE, Lithography, OpenModelica, Bayesian optimization
1. 緒言
二光束干渉露光は2本のビームを干渉させて生じる干渉縞を用いて感光材に周期パターンを転写する露光手法である(1)(2)(図1(a)).本手法の特徴として2本のビームの入射角θを調整することで,次の式に従って周期パターンのピッチpを変更することができるため,通常の露光機で必要となる遮光マスクを必要としない.
ここで,λはビームの波長,nは入射面の屈折率を表している(図1(b)).これにより形状変更時のマスク製造時間,コストを抑えることができる.また一般的な露光機と比べて,平坦度が粗いワークに対して実現できる微細度が非常に高いという特徴もある.
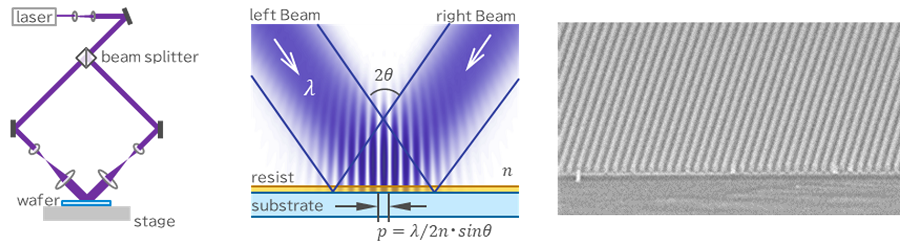
(a)Optical system (b)Interference patterns (c)Fabricated patterns
Fig.1 Two beam interference lithography
弊社で開発している二光束干渉露光機は,高品質な露光を実現するために重ね合わせスキャン露光という方式を採用している(3).この手法では一度スキャン露光した領域に対して干渉縞が合うようにステージを少しずらして再度露光を行う(図2(a)).これにより光学部品の収差などによって生じる干渉縞の歪みの影響が平滑化されて均一性の高い露光を実現することができる(図2(b)).我々は本露光手法をSOPHIL (Scanning Overlapped Phase Interference Lithography)と呼んでいる.本手法における技術課題は数百nmの周期で生成される干渉縞の山と山を一致させることである.停止中の位置安定性は±5nm,スキャン露光時の位置精度は±10nmが要求される.ステージのスキャン速度は装置の処理可能ウェハ枚数に直結するので将来的にスキャン速度を10mm/sから100mm/sへと高速化することを検討している.100mm/sスキャン露光における位置精度±10nmを達成するための開発方針を明確にするために,干渉露光機のモデル化に取り組んでいる.
本報告では,まず干渉露光機のステージ動作に関するモデル化について説明する.その後,現行機をモデル化する際に生じる未知のパラメータに対してベイズ最適化を用いたパラメータ調整に関して紹介する.現状得られているモデルと実測データの比較結果に関しても報告する.
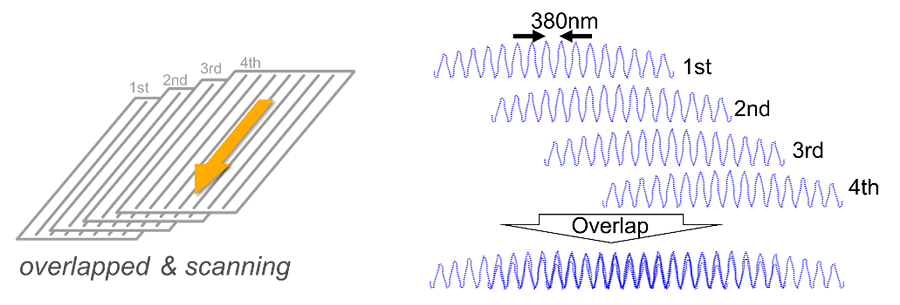
(a)Principal (b)Smoothing
Fig.2 SOPHIL : Scanning Overlapped Phase Interference Lithography
2. 1D-CAEモデルによるステージ動作のモデル化
2・1 H型ステージのモデル化
我々の二光束干渉露光機では剛性設計の観点から,重心を低くしたままX,Y動作を実現できるH型ステージを採用している(4)(図3(a)).X方向動作ではステージはXガイドに沿うように移動するが,Y方向動作時にはステージとXガイドが一体となってY1,Y2ガイド上を移動する.このステージ動作を3つの質点に置き換えてモデル化する(図3(b)).3つの質点はそれぞれX,Y1,Y2ガイドに沿うリニアモーターが動かさなければならない慣性質量を表している.ステージのX位置は質点mxの位置,ステージのY位置は質点my1,my2の位置の平均で表すことができる.質点my1,my2の位置の差分はステージの回転に相当する.各質点に定盤との接続を意味するばね要素などを加えてH型ステージの1Dモデルを作成した.モデル作成にはOpenModelicaを使用した.
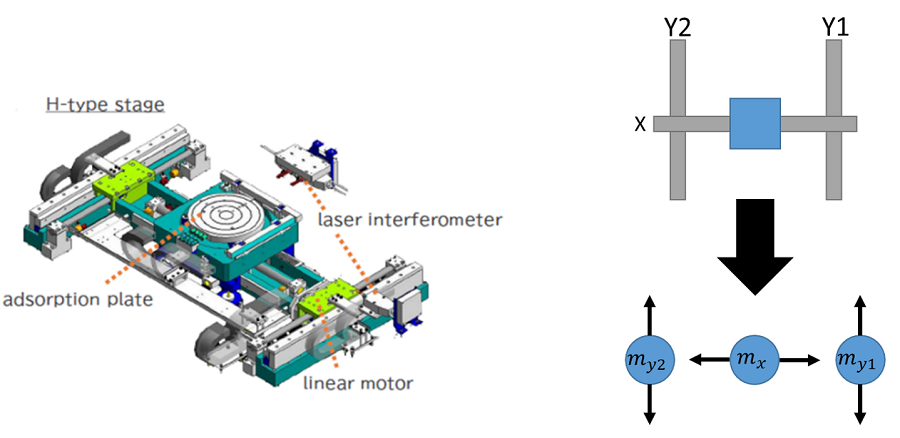
(a)H-shaped stage (b)Modeling
Fig.3 Modeling of H-stage
2・2 制御系・リニアモーターのモデル化
H型ステージはX,Y1,Y2軸のリニアモーターによって駆動され,レーザー干渉計によってX,Y1,Y2軸上の位置を測定されている.測定された位置と指令値との差分に対してPID制御を行うことでステージ位置の制御を行っている.このPID制御とPIDからの指令を受け取りステージに駆動力を伝えるリニアモーターもモデル化した.PID制御は使用しているコントローラの制御ブロック図を基にモデル化を行った.OpenModelicaは通常[m]単位で計算行うが,コントローラは[count]単位(1[count]=1.234[nm])なので単位換算に注意する必要がある.コントローラは位置情報を受け取り,電圧指令を出力するので出力における単位換算にも留意してモデル化した.リニアモーターは3相の交流電流で駆動力を発生させるが,モデルを簡略化するために直流回路でモデル化した.回路を流れる電流に推力定数のカタログ値を乗算することで力に変換している.
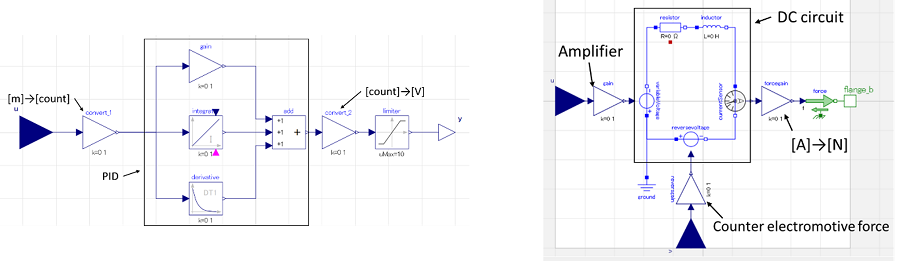
(a)PID (b)Linear motor
Fig.4 Modeling of PID and Liner motor
3. ベイズ最適化による未知パラメータの推定
PID制御,リニアモーター,H型ステージの各1Dモデルを接続することでステージの駆動を表現することができるが,実測データにモデルの振る舞いを近づけるためにはいくつかの物理パラメータを測定する必要がある.しかし既に組み立てられていて稼働している装置において,個別に物理パラメータを測定することが難しいものが存在する.例えばステージと定盤の接続要素やレーザー干渉計とリニアモーターの平行度である.これらの要素を測定するに稼働している装置を分解する必要が生じてしまう.また再度組み立てを行った結果の再現性の観点からも物理パラメータの測定は現実的ではない.そこで装置稼働データをもとにベイズ最適化を行うことで未知パラメータの推定を行った.ベイズ最適化とは入力と出力の関係を予測しながらデータ取得を繰り返すことで効率的に最適値の探索を行う手法である.今回は合計21個の物理パラメータの最適化を行った.この最適化を人力で行うことは現実的ではないが,ベイズ最適化を行うことで局所最適な値を得ることができる.これにより既に稼働している装置のモデル化を効率的に行うことができた.
装置の稼働データとしては駆動領域中心におけるX,Y方向の50mmステップ移動時の指令値と実測値の差分(PIDコントローラへの入力値)を使用した.ステージ固有の変動を取り出すために,実測データは5回測定の平均値として外乱の影響を取り除いた.ベイズ最適化には機械学習分野で使用されているoptuna(5)というライブラリを用いて,OpenModelicaとpythonを連携させて実装した.
最適化結果を図6に示す.グラフの横軸は時間,縦軸は指令値と実測値の差分になっている.グラフ内青線が実測データ,オレンジ線がシミュレーション結果のプロットである.X,Y方向ステップそれぞれに対してX,Y1,Y2,Y1-Y2の計4つのグラフを出力させている.Y1-Y2はステージの回転に相当している.グラフから明らかなようにステップ方向と沿う変動ではシミュレーションと実測はよく一致している.一方で,ステップ方向と垂直な変動では,上手く再現できていない変動が確認できる.上手く再現できていない要素の特定,モデル化が今後の課題である.
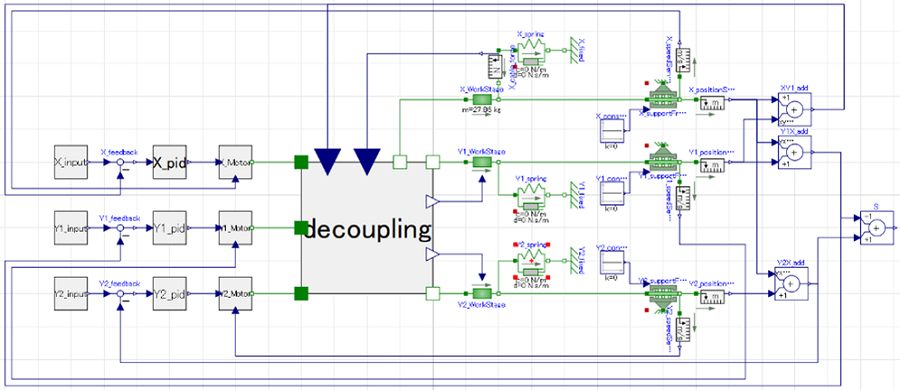
Fig.5 Model of interference lithography stage
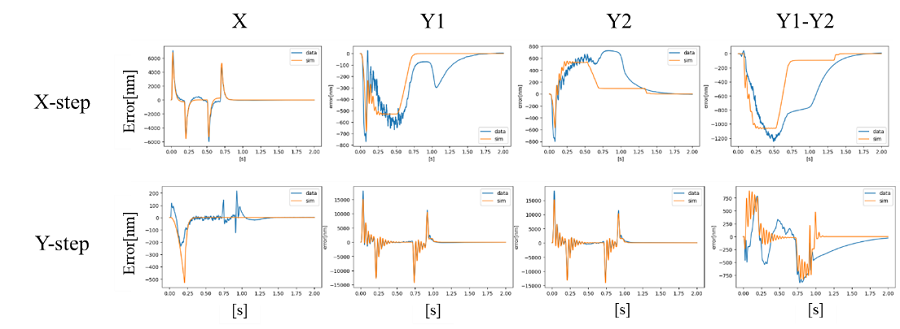
Fig.6 Result of Bayesian optimization
4. 結語
本報告では,OpenModelicaを用いて二光束干渉露光機のステージ動作の1Dモデルを作成した.またモデルのパラメータ最適化では,pythonとOpenModelicaを連携させることでベイズ最適化を実装し実測データとモデルの振る舞いが合うように最適化を行った.最適化の結果,ステップ方向と沿う方向の変動は上手くモデル化できたが,垂直方向の変動では再現できていない振る舞いが確認できる.モデルのさらなる精度向上に加えて,再現できていない振る舞いの原因の特定・モデル化は今後の課題である.
文献
(1) Konkola, Paul Thomas., “Design and analysis of a scanning beam interference lithography system for patterning gratings with nanometer-level distortions”, Diss. Massachusetts Institute of Technology, 2003.
(2) Chen, Carl Gang., “Beam Alignment and Image Metrology for Scanning Beam Interference Lithography Fabricating Gratings with Nanometer Phase Accuracy”, Diss. Massachusetts Institute of Technology, 2003.
(3) ウシオ電機株式会社,”干渉露光技術”,< https://www.ushio.co.jp/jp/feature/functional_device/trust/interference_exposure.html >, (参照日 2023年10月24日)
(4) H. Butler, "Position Control in Lithographic Equipment [Applications of Control]," in IEEE Control Systems Magazine, vol. 31, no. 5, pp. 28-47, Oct. 2011, doi: 10.1109/MCS.2011.941882.
(5) Optuna, < https://optuna.readthedocs.io/en/stable/index.html >, (参照日 2023年10月24日)
Copyright © USHIO INC. All Rights Reserved